Self-Driving Car Demonstration
- Project date: September 4th, 2023









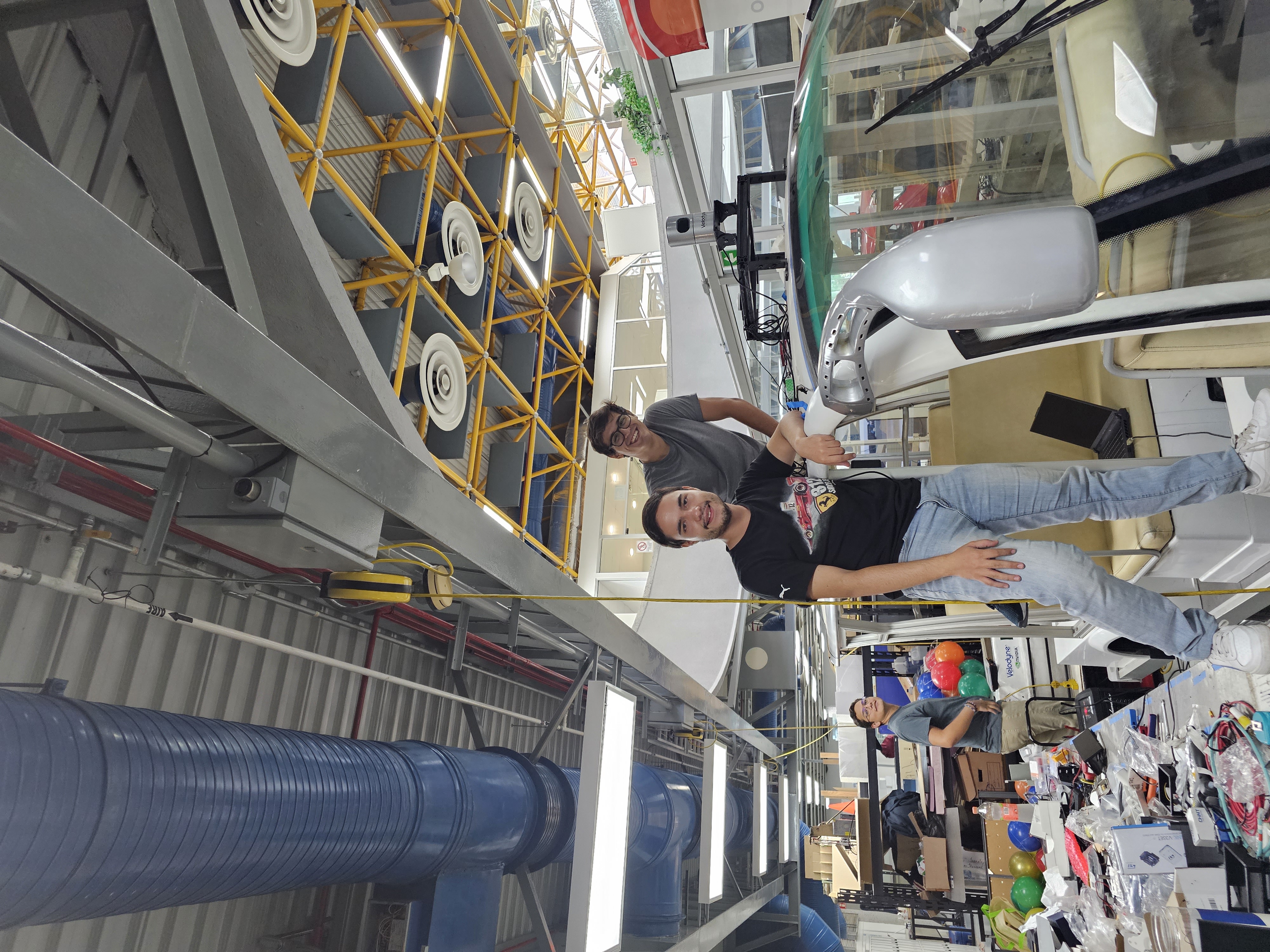




On September 4, a demonstration event took place in the facilities of Tec de Monterrey to showcase the achieved results of the Self-Driving Car project developed by VantTec. Tec de Monterrey's and ZF Group's directors visited the team to assess the final results.
In the next video, a short demonstration of the longitudinal and lateral control is first performed in a parking lot, following a predefined route. Then, at the end of the autonomous-course, the vehicle is driven inside the Campus via the xbox controller.
Steering and Braking System for Autonomous Golf Cart
- Project date: January - July 2023
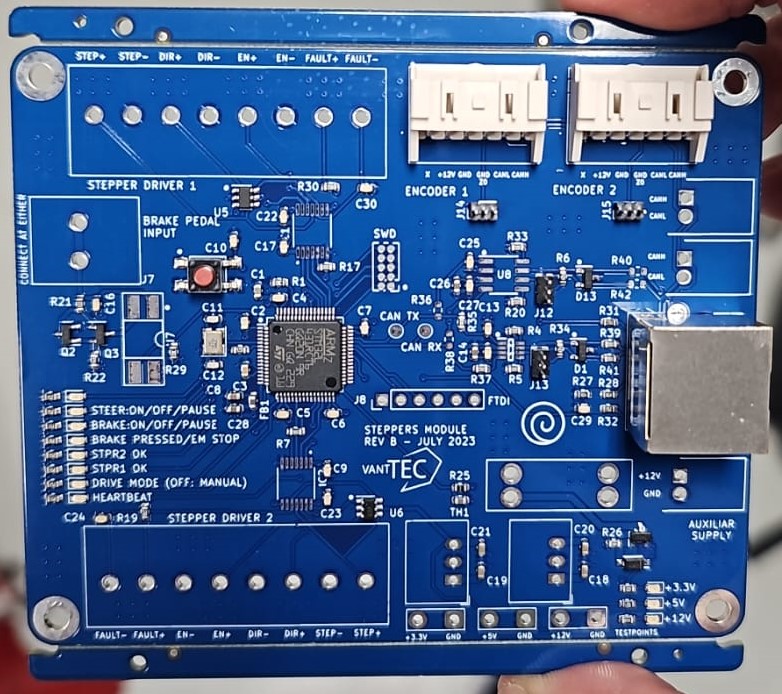
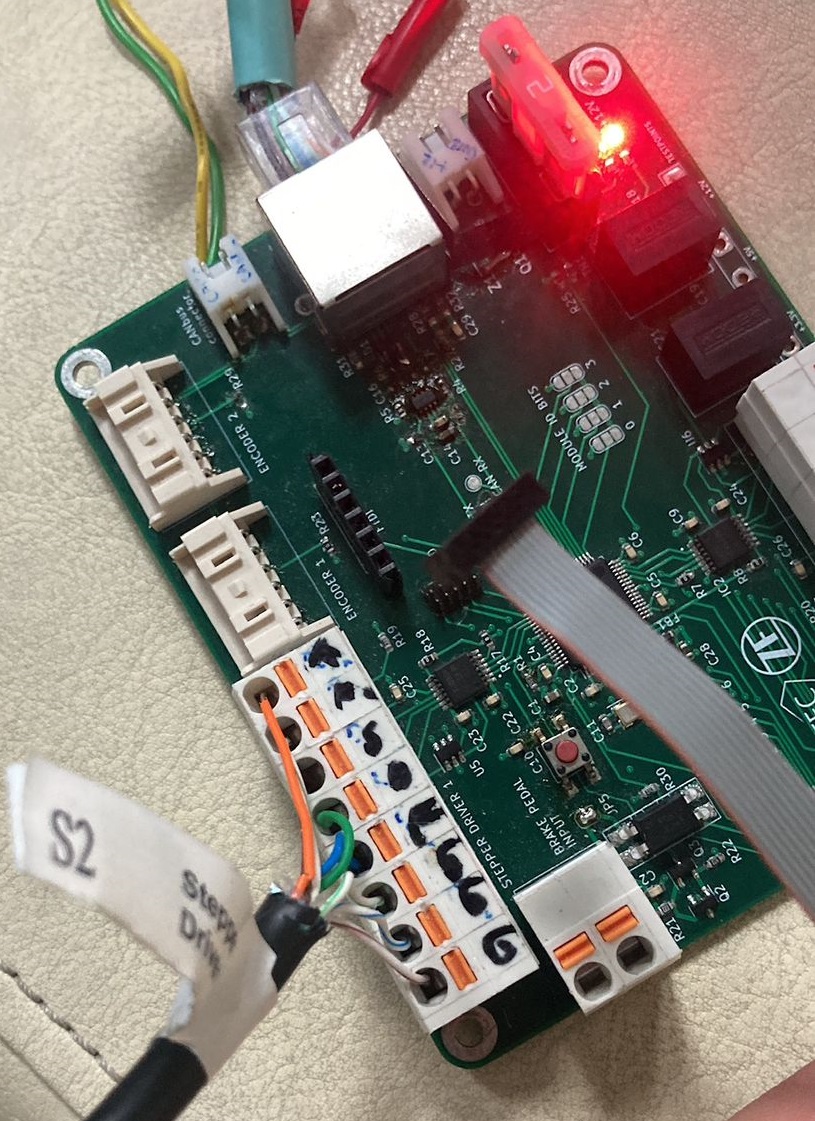
Designed steering and braking control boards for an electric golf cart shuttle based on STM32L431RC microcontrollers in KiCAD. A single board can be used for both steering and braking tasks, or separately.
Each module seamlessly incorporates a MAX33040EAKA+T CAN transceiver, facilitating effective communication with other nodes. Furthermore, the board features connectors for two stepper drivers, enabling precise control over the steering wheel, brake pedal, or both. Additionally, the board interfaces with two CAN encoders (IFM RM8004 and Briter BRT38) to accurately measure pedal and steering wheel angles.
The modules are thoughtfully designed so that a single CAT-6 cable can efficiently connect the board to the CAN-bus while simultaneously powering its systems.
In terms of software, FreeRTOS tasks were programmed to manage stepper motor control and CAN communication. Libraries were created for CAN frame parsing to decode signals from the steering wheel or pedal brake encoders, enabling facilitating actuation of the steering and braking steppers. This control system can be operated either via an Xbox controller or by specifying desired angle inputs.
Car Mathematical Modeling, Characterization, Control Design and Navigation
- Project date: December 2022 - August 2023
Vehicle Mathematical Modeling and Characterization
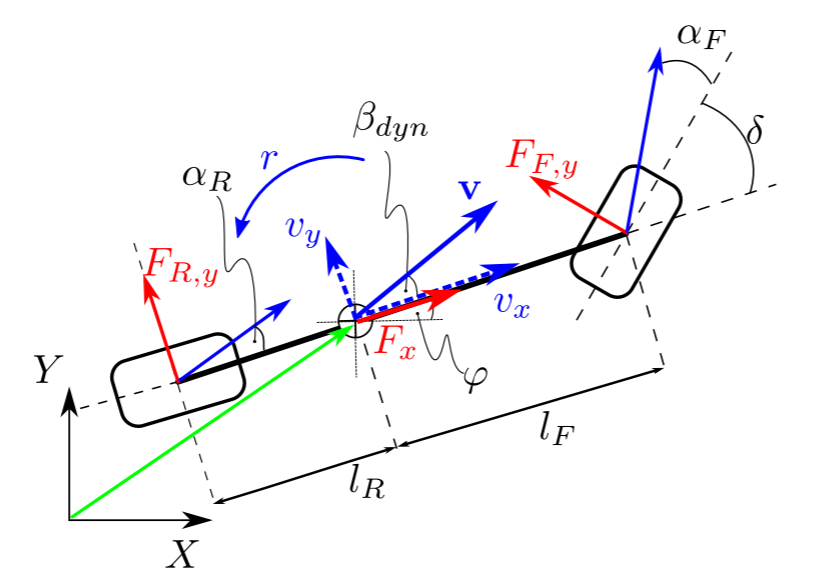
Research-oriented development and characterization of vehicle dynamics based on a bicycle model for the car. Conducted experiments in a parking lot to determine the rolling resistance and the propulsion forces of the car induced by a 255-step digital potentiometer embedded in a PCB module connected to the vehicle motor controller. A VectorNav VN-300 was employed to measure vehicle speed and acceleration profiles against different step inputs on straight-line tests. Initial validation was done in simulations, with Rviz.
(Video descriptions hold more info on each implementation)
Car Control Design
Implemented lateral and longitudinal control schemes in real life for the golf-cart shuttle. The lateral control employs the Stanley guidance law, while longitudinal (velocity) control utilizes PID, ASMC, or AITSMC designed controllers. These controllers were initially developed in ROS2 simulations and later fine-tuned in real-world scenarios. Used custom-built controller library. Model characterization and controllers’ design required fast implementation and were completed during August 2023 in a span of four weeks.
(Video descriptions hold more info on each implementation)
Navigation
performed waypoint navigation in a parking lot based on NED-reference frame goal positions obtained from VectorNav VN-300 GPS measurements and started integration with an AMCL-based localization system for in-Campus navigation.
(Video descriptions hold more info on each implementation)
Collision Avoidance for a Boat
- Project date: February - April 2020
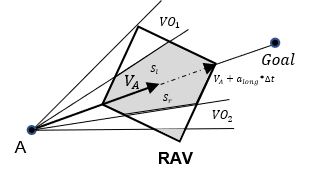
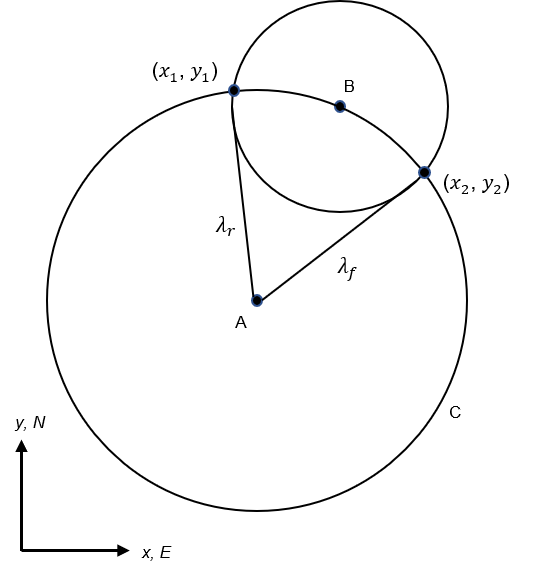
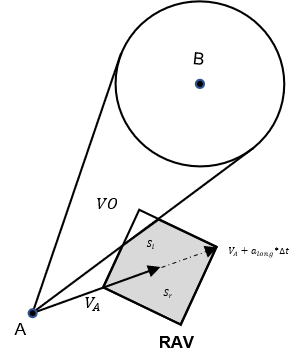
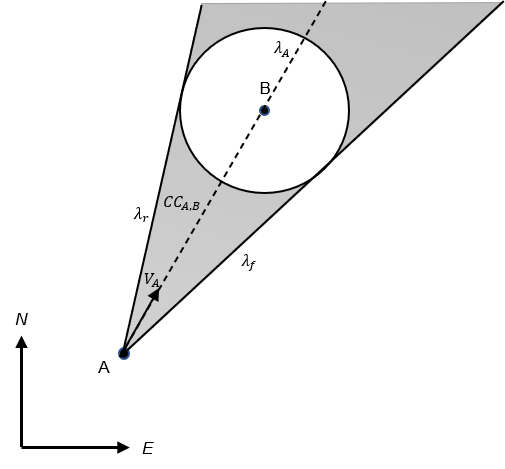
Developed collision avoidance method for a boat based on Velocity Obstacles in simulations with RViz and ROS for RoboBoat 2021. The Velocity Obstacle method considers an agent's current velocity and heading and calculates a set of velocities that the agent can safely choose to avoid collisions with nearby obstacles. This set of safe velocities is represented as a geometric shape known as the "Velocity Obstacle." The Velocity Obstacle is defined in the agent's velocity space, and it encodes the possible velocities that would result in a collision with obstacles if chosen by the agent. By avoiding velocities inside the Velocity Obstacle, the agent can guarantee collision avoidance. The Computational Geometry Algorithms Library (CGAL) was used to create geometric representations and operations of polygons used in this method, which was also useful for visualization in Rviz.
More info in this report
3D Object Position Estimation using LiDAR + ZED for a Boat
- Project date: February 2022 - April 2022
Employed a previously developed buoy detection method based on the Velodyne VLP-16 LiDAR. This method classifies buoys based on their physical dimensions (width, height, and depth), but it often failed in real-life scenarios due to noise. Since it relied on physical shapes, any object with similar dimensions to a buoy would be misclassified as one. To enhance accuracy, a 3D object detection using the ZED camera and YoloV3 was developed. A pre-trained YoloV3 object detection network was used through a ROS package with GPU support. This package provided distance estimation using the ZED's depth map, and trigonometric calculations were applied to estimate the 3D position of each detected object. To validate the presence of objects detected by the LiDAR method, the Yolo-ZED detection was utilized for verification. Although results were obtained, they were not entirely satisfactory.
Simulation Environment for RoboSub and RoboBoat competitions
- Project date: December 2019 - February 2020
Developed Gazebo simulator environment for online RoboNation competitions during the pandemic, serving to validate challenge solutions and ease future development when physical testing isn't feasible. The simulator utilizes dynamic models for USV (used in real life to design controllers) and UUV to simulate their state (pose and velocity), features 3D models for both vehicles, includes a simulated sensor suite (LiDAR and stereo camera for the boat, two cameras for the submarine), provides a basic lake scenario, and incorporates custom props for each competition.