Robust Control for Unmanned Underwater Vehicles (UUVs)
- Project date: February 2020 - July 2022
Custom UUV design
Designed a custom 6-thruster configuration for a 6-DOF Unmanned Underwater Vehicle (UUV), shown in the next figure, that provides fully-actuation with no excessive number of thrusters and prioritizing longitudinal motion, yet, enabling lateral movement in a lesser degree.
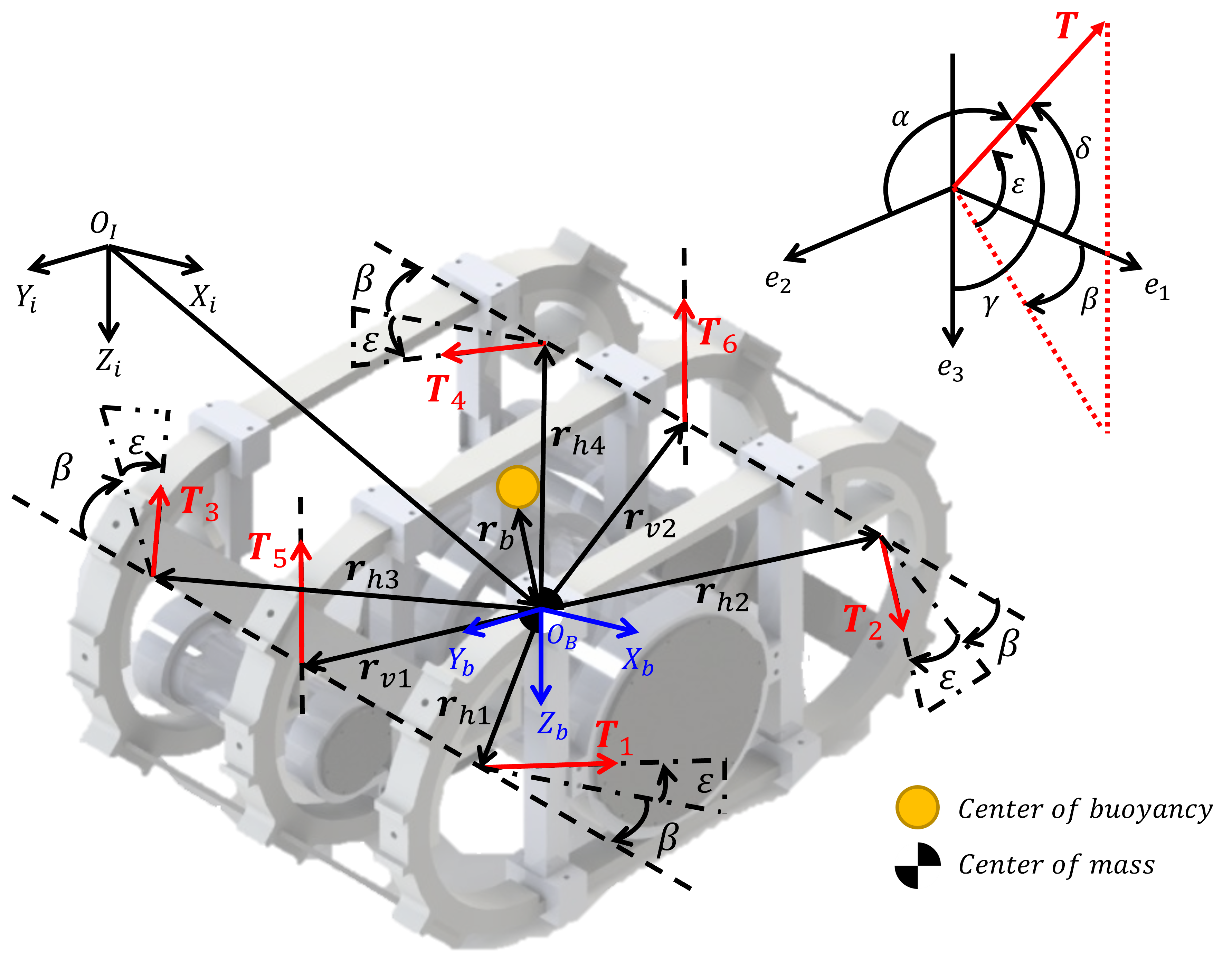
After defining the vehicle thruster configuration and estimated weight and fluotation properties, the vehicle dynamics were characterized using CAD tools, specifically solidworks flow simulations to obtain drag and added mass coefficients. With the identified parameters, the model was initially simulated in Simulink.
Robust Control design
Designed 6-DOF sliding-mode-based controllers for an UUV. These controllers provide robustness against unmodeled system dynamics, insensitivity to parameter variations and external disturbance rejection. These control laws were used in turn as auxiliary controllers to develop model-based feedback linearization controllers for the UUV.
Implemented a second order ASMC and ANTSMC for an UUV and aided in the development of a first order AITSMC as research topics.
Controller Library
In order to test the designed controllers, a C++ controller library was developed, intended for use in various vehicles. This library offers PID and SMC-based control laws, which can be used independently or as supplementary control signals for feedback linearization controllers. It also includes base class definitions for marine and car-like vehicles, used to create specific controllers for real-world vehicles. Also, the library provides definitions for Line-Of-Sight and Stanley controllers, employed as guidance laws. This library has undergone real-world testing in a car and in simulations for a boat and submarine.
Trajectory Generation for an UUV
- Project date: September 2022 - April 2023
Trajectory Generation based on S-Curves
Developed a simple C++ motion planning library with RRT* sample-based planner (from OMPL) used for trajectory generation based on sigmoid-curve jerk profiles to obtain smooth references for an UUV (tested in simulations) on 2D maps.
You can read more in this report